
THE ASSIGNMENT:
Design and build a motion system with 2.5 degrees of freedom. The team had to design all the mechanical and electrical sub-systems and integrate them to demonstrate a functional prototype.
CHALLENGE:
Make the complete system small and light enough to be easily carried in a backpack.
OUR GOAL:
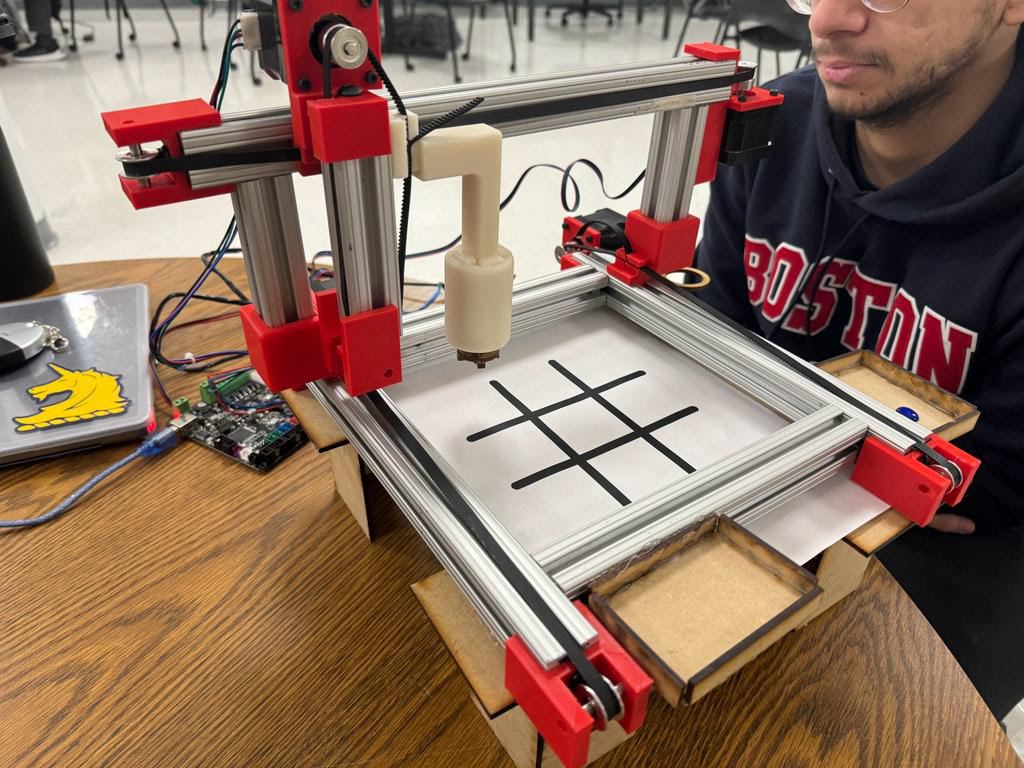
Create and program a machine that can play tic tac toe with the user and make decisions in real time to decide where to play next, depending on the user's input
INITIAL CONCEPT:
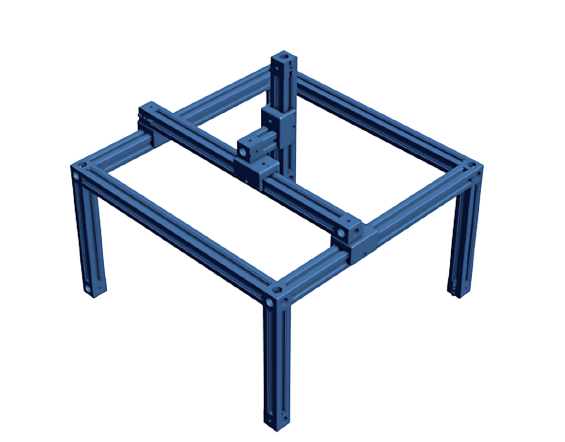
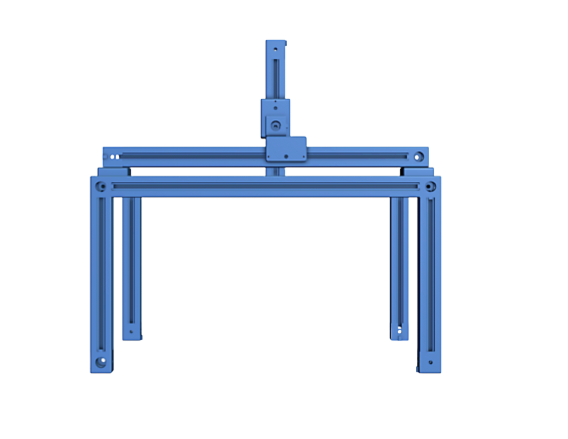
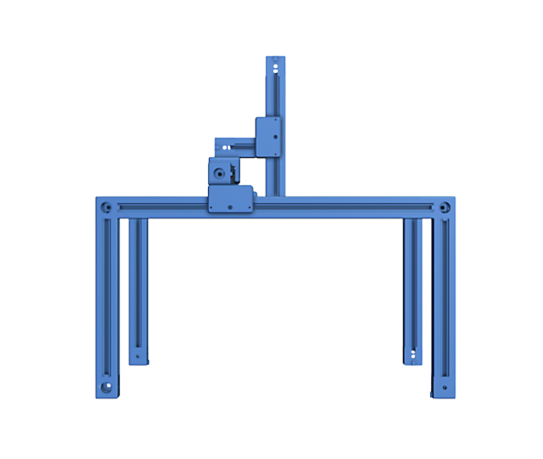
FINAL DESIGN SELECTED:
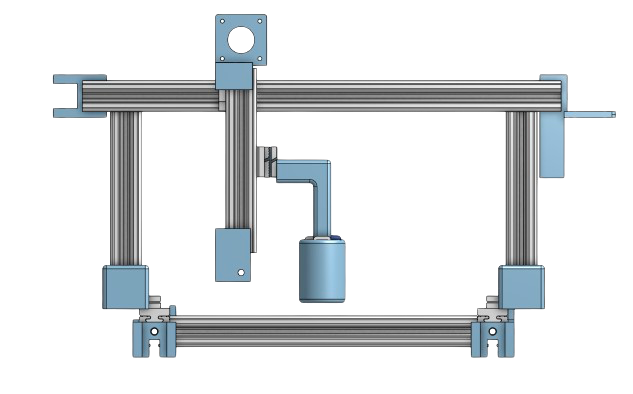
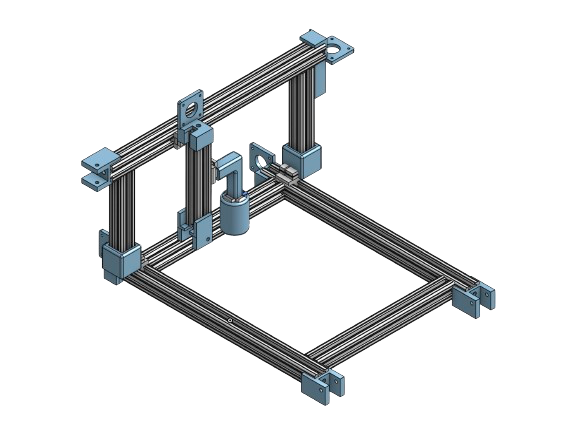
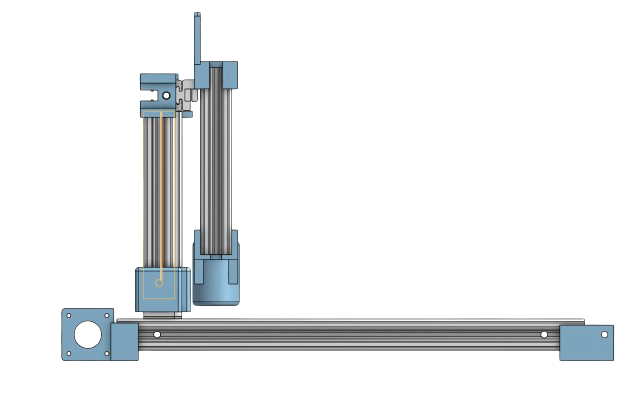
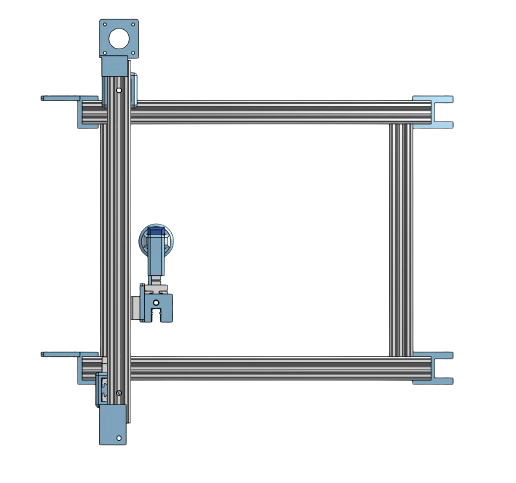
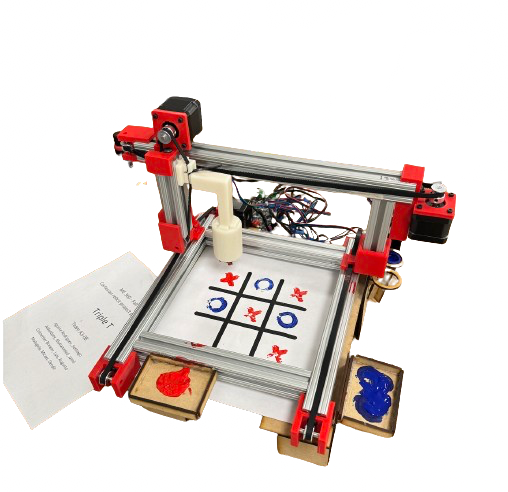
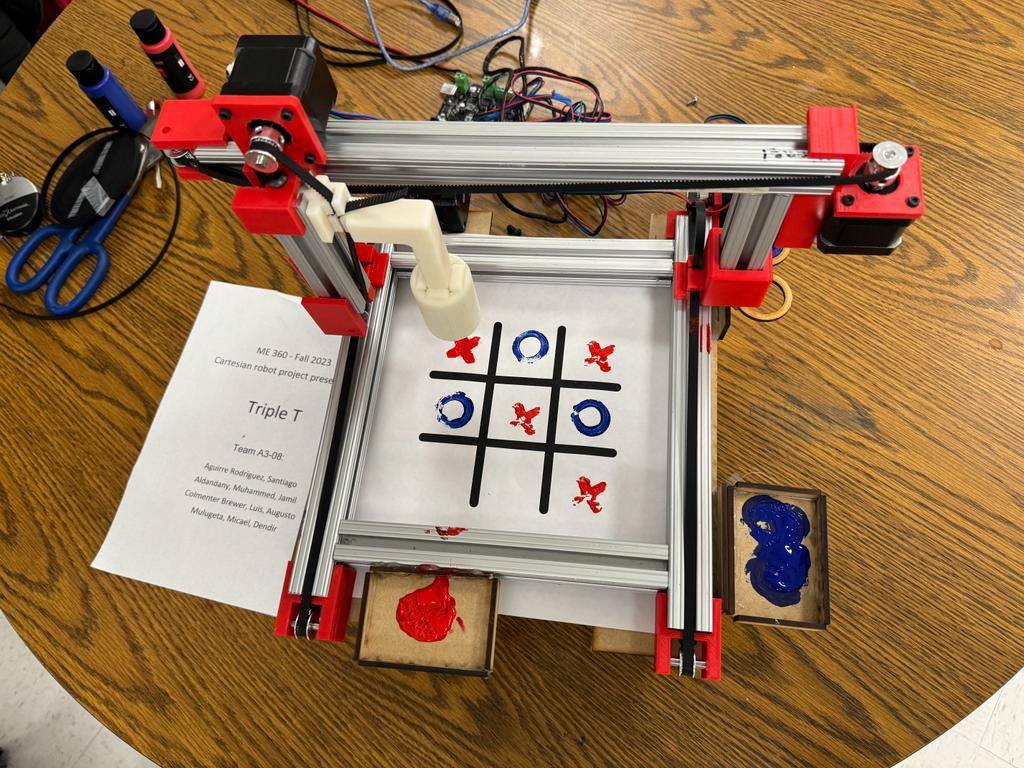
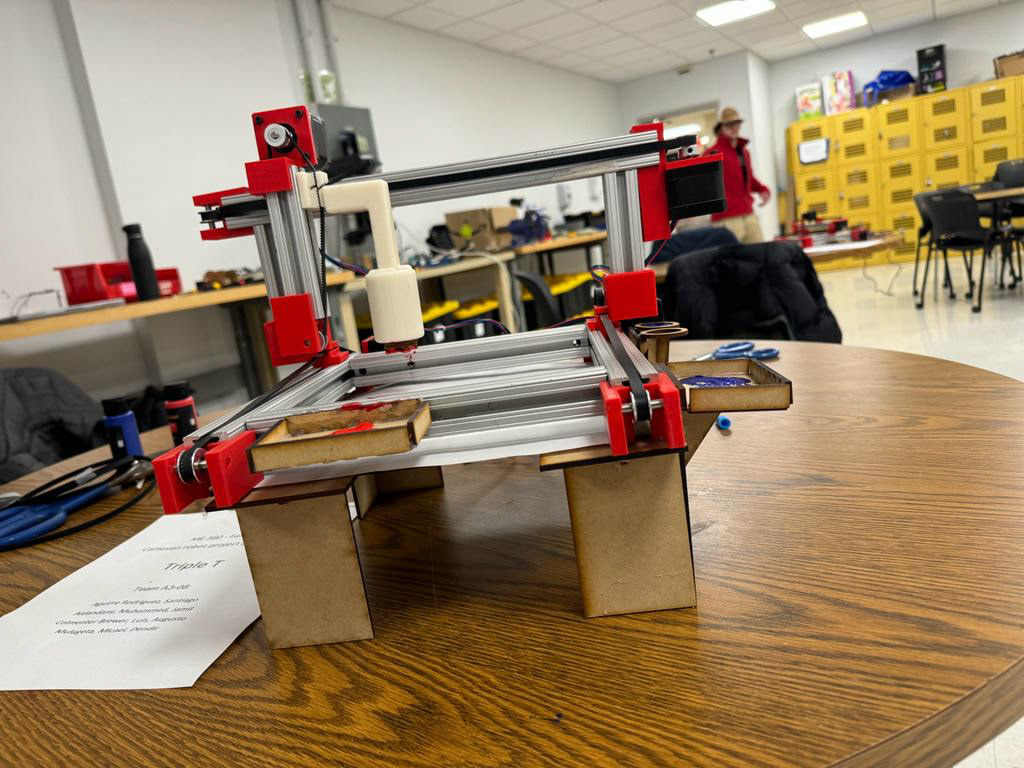
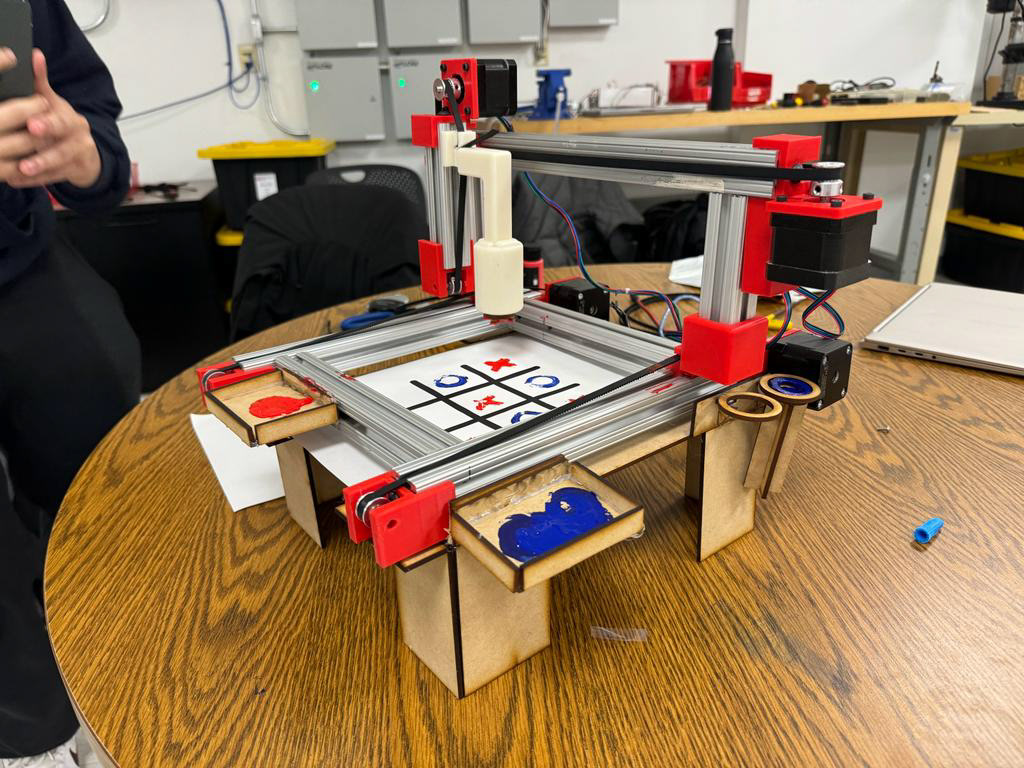
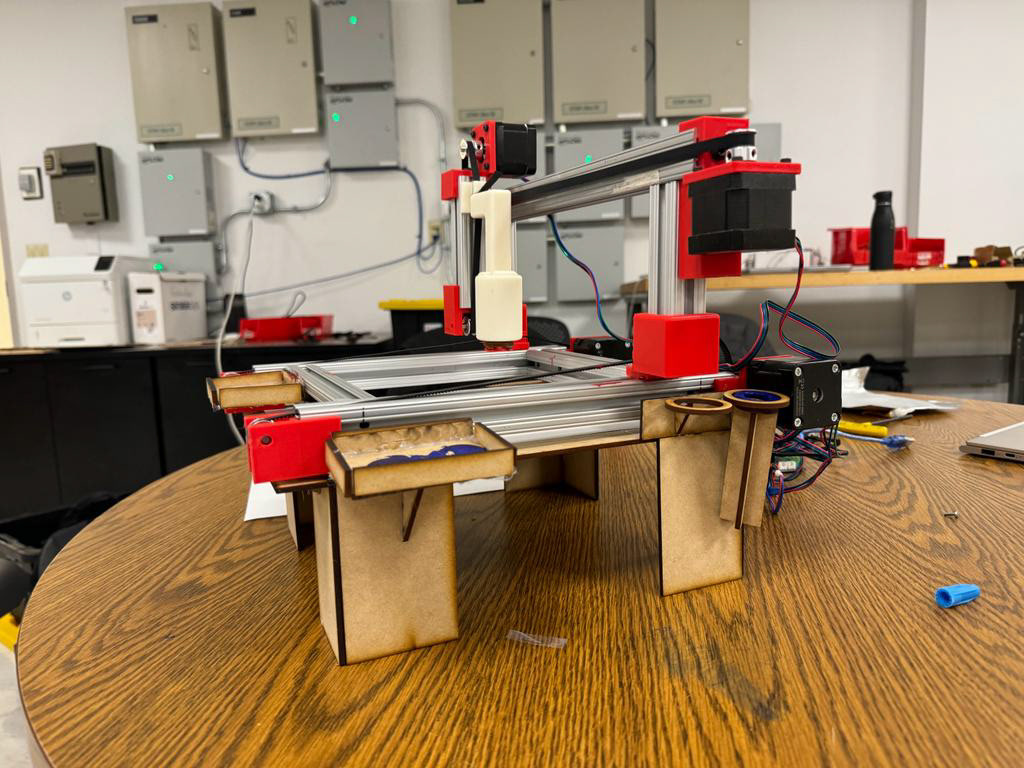
The design presented above is the final design chosen for the project. Our design has three degrees of freedom. It is able to move anywhere in the x, y, and z axes.
Our machine had a stamp holder, where once the player decided if they wanted to play with Xs or Os, the opposite stamp could be inserted. This holder was built at a size in which the stamps could simply slide in and out with out any complications.
The stamps worked with paint, so two paint holder were also added to the base in which the machine was placed. Here, both the machine and user could dip their stamps in paint to keep on playing without their respective stamp drying out.
The final working machine can be seen in the videos below.
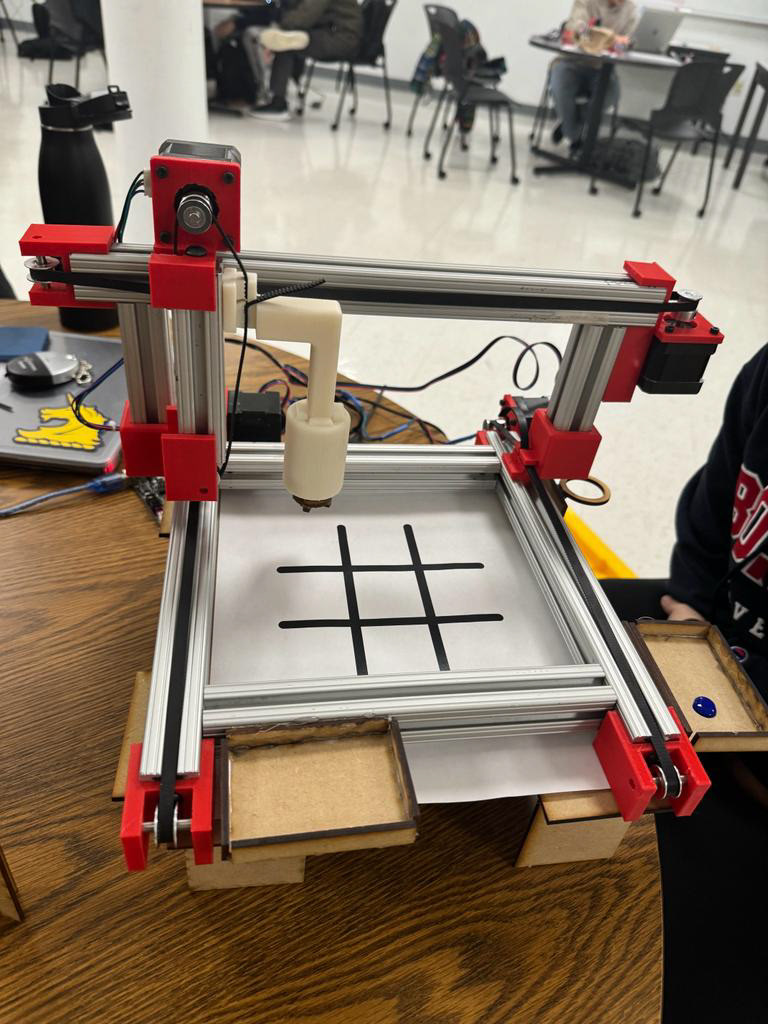
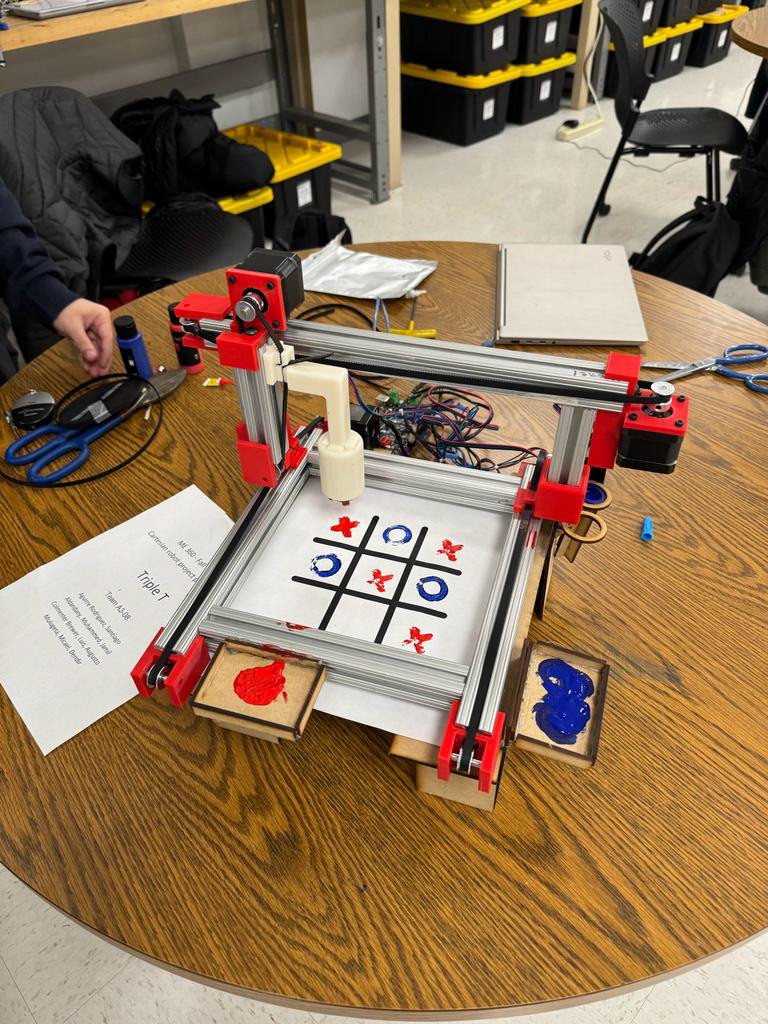
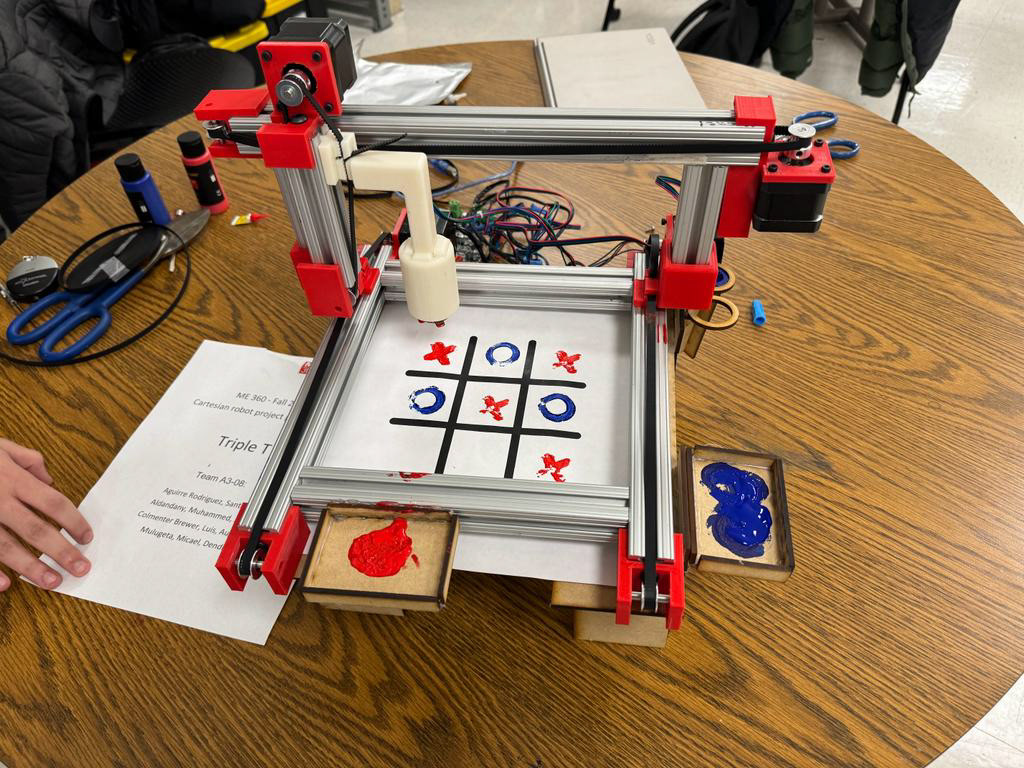
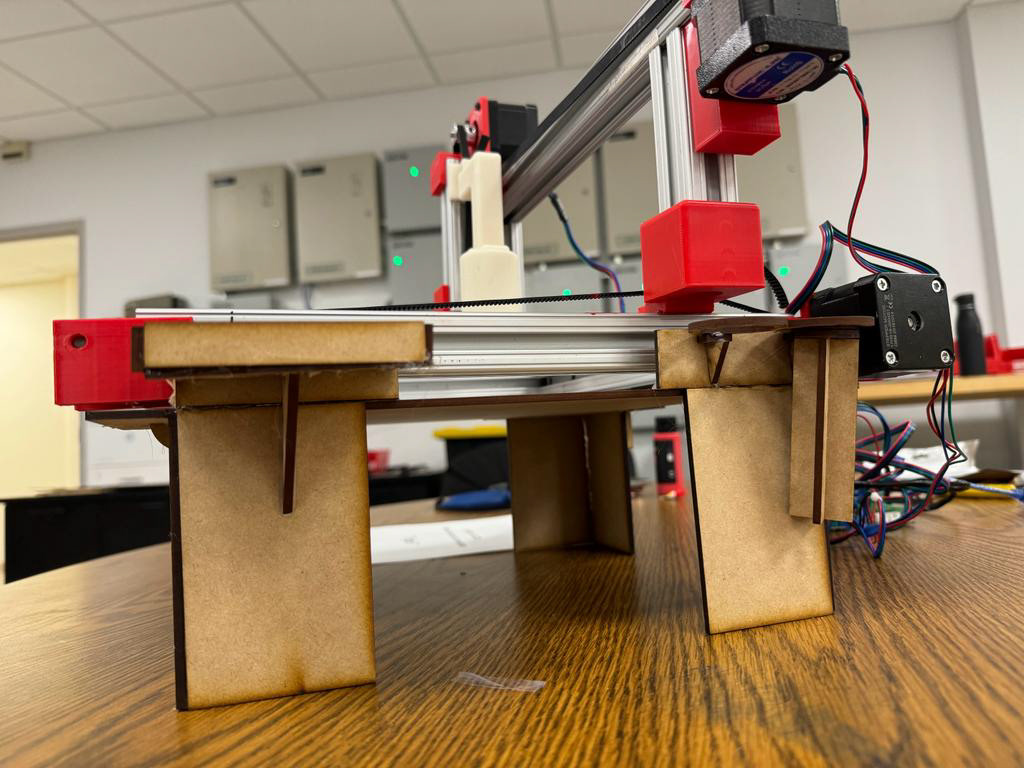
Below are some photos of our final presentation, where we displayed our project to all of the other teams.


PROJECT CONCLUSION
Personally, I was very satisfied with how the project turned out. We worked really well as a team, and we had no problems with any of our team members. The machine could successfully move with 3 degrees of freedom, and it resulted in a fun and entertaining tic-tac-toe game. A modern take to a centuries old game.
The only thing that I would change is the belt holders for the two belts for the second and third degree. We didn't leave a lot of room to properly push the belt in the holder, which resulted on the tension slowly weakening until the belt eventually slipped out during one of our trials and caused the stamp holder to fall. Similarly, on another one of our trials, the belt on the second degree also came loose, and because it wasn't tight enough, the motor pulley couldn't pull on it and we lost movement in the second degree.
Even though this sounds bad, we just had this problem in two of 30+ trials, so the machine was still very successful.
Our initial goal was to get the machine to make real-time decisions based on where the user was playing, so the machine could try to beat you very time. Because of the tight deadline we had, we decided to just hard code the machine, removing a bit of user interactivity but still showcasing its full range of motion. The code to get the machine to make real-time decisions and try to beat the user can still be added because the prototype would be the same, so it is a nice software update that could be uploaded in the future to make this game even more engaging, and maybe find an answer to the question that many people think about nowadays...
Could machines eventually outsmart humanity?